


Combinaison Interface |
Sonde Interface |
La sonde interface fait partie d'un système pionnier qui permet aux équipes d'exploration de conduire des investigations dans des sites périlleux sans même quitter leur vaisseau.
En 2370, la première mission de terrain virtuelle se déroule par le truchement d'un système interface piloté. Une technologie synergique conjugue une sonde interface lancée sur un site dangereux et un utilisateur portant une combinaison interface. La sonde envoie des signaux télémétriques à la combinaison interface, donnant à celui qui la revêt l'impression d'être sur le terrain, à la place de ladite sonde. L'utilisateur est alors en mesure de toucher, d'examiner et de déplacer des objets à distance, grâce aux fonctions de commandement relayées vers la sonde. Pour la première fois, une sonde a la possibilité d'affecter l'environnement qu'on la charge d'étudier.
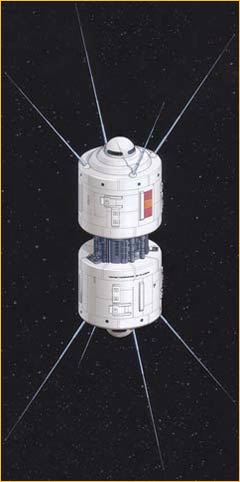
Dans son concept comme par ses lignes, la sonde interface présente peu de similitudes avec ses homologues automatisées que les lance-torpilles à photons de Starfleet émettent régulièrement dans l'espace. Plus important que, tout, on lance la sonde interface à partir d'un hangar, à la façon d'une navette. En d'autres termes, son concept n'a pas à se plier aux contraintes de carter des torpilles à photons. La sonde interface consiste en deux cylindres déjetés à l'oblique.![]()
Dans sa globalité, elle fait moins d'un mètre de hauteur. Si elle se démarque donc du calibre de configuration propre aux sondes ordinaires, le modèle interface se construit en fonction des mêmes éléments et techniques que la sonde automatisée moyenne.
Toutes les sondes sont réalisées en tritanium-duranium au blindage gamma et en boronate de lufium fixé par pression. Des détecteurs sont implantés dans la coque externe au moyen d'un procédé analogue à celui qui consiste à insérer des détecteurs au revêtement externe des vaisseaux spatiaux. Ces détecteurs à forte condensation captent et évaluent un grand nombre de phénomènes, dont notamment les ondes subspatiales et électromagnétiques, la matière moléculaire, tous les éléments atmosphériques et l'énergie qui est canalisée jusqu'à la sonde elle-même.
Une sonde interface standard comprend un moteur interne dédié à l'alimentation de ses boîtes d'instruments et à sa propulsion dans l'espace. Il s'agit d'un système de propulsion à micro-fusion du deutérium vectoriel conventionnel et de bobines motrices en régime continu, l'ensemble étant capable de vélôcités subdistorsionnelles. Du deutérium de secours est stocké dans la sonde interface afin d'alimenter le système antigravitationnel embarqué nécessaire aux manœuvres dans les espaces confinés, que ce soit pour y entrer ou en sortir.
La sonde interface n'est en outre équipée d'un système complexe de rayons tracteurs et de phaseurs qu'on ne trouve pas souvent dans les sondes automatisées. Les rayons tracteurs sont conçus pour servir de mains à l'utilisateur de la combinaison interface.
Le dernier composant est le transcepteur subspatial. Le mécanisme de communication de la sonde interface doit être d'une puissance et d'une rapidité accrue pour mener à bien ses interactions en temps réel avec l'utilisateur de la combinaison interface. Il est donc équipé d'un rayon à particules concentré apte à se jouer de n'importe quelle interférence. Plus il y a d'interférences cependant, plus la sonde interface devra être proche du système récepteur.![]()

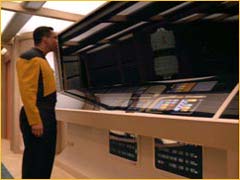
Lors de l'essai du système interface en 2370, on découvre que des entités subspatiales peuvent puiser dans le système de communication interactif de la sonde pour lire les pensées de l'utilisateur de la combinaison. Elles sont capables de présenter à la sonde interface une image qui a un sens pour l'utilisateur. En l'occurrence, ces êtres créent la vision de la défunte mère de Geordi La Forge, Ingénieur en Chef de l'USS Enterprise NCC-1701-D. Cela s'avère presque fatal : surpris de revoir sa mère, Geordi l'attrape par les épaules... et encaisse une décharge massive de la sonde.
Certaines sondes possèdent des commandes restreintes post-lancement qui permettent à un opérateur d'ajuster le cap et l'orientation. La sonde interface s'active au moyen de trois mécanismes différents de contrôle. D'abord, les fonctions de commande de la station scientifique d'un vaisseau guident la sonde à destination et, quand cela s'avère possible, la font revenir à bord. Depuis ce poste de commandement, la sonde peut, par exemple, être dirigée vers un navire désemparé et s'y introduire par le biais d'un sas, ou en découpant une cloison.

Il est possible de contrôler le trajet de la sonde interface grâce à la combinaison interface, mais cela ne présenterait pas une grande commodité en raison de vitesses subspatiales limitées. Un voyage de plusieurs heures serait fastidieux pour le porteur d'une combinaison interface.
Une fois la sonde arrivée à destination, la combinaison dispose de nombreuses options de contrôle. Elle permet de commander le système antigravitationnel, tandis que l'utilisateur « déambule » sur le site, et se sert de rayons tracteurs pour ramasser et déplacer des objets, télécommander à distance et ainsi de suite. Une troisième batterie-de commandes reste à disposition de la personne chargée de surveiller les signes vitaux de l'utilisateur de la combinaison interface. L'utilisateur peut déclencher une décharge de phaseur ou un rayon tracteur inversé à partir de la sonde, mais devra pour ce faire s'en remettre au superviseur.
Avant 2370, une sonde automatisée collecte et transmet les données télémétriques jusqu'à ce qu'elle soit anéantie par l'environnement dangereux qu'on l'avait envoyée analyser. Le nouveau système interface réinvente le rôle de la sonde : de collecteur passif, elle devient acteur des événements.
![]()
![[]](http://m3.moostik.net/img/?pseudo=scottcollinsl&data=live&police=twanette&background=cccccc&foreground=000000&option=transparence&width=3)

![[]](http://m3.moostik.net/img/?pseudo=scotcollinst&police=twanette&background=cccccc&foreground=000000&option=transparence&width=6)